|
Hi! I am a second-year PhD student at Technical University of Munich and University of Oxford under ELLIS, supervised by Prof. Daniel Cremers and Prof. Andrea Vedaldi. I also work closely with Prof. Chuanxia Zheng and Dr. Nikita Araslanov. I am currently a Student Researcher at Google Zurich. Previously, I received my Master's degree in Computer Science from ETH Zurich advised by Prof. Marc Pollefeys. I worked on 3D vision projects at Microsoft Spatial AI Lab Zurich, Computer Vision and Geometry Group (CVG), and Computer Vision Lab (CVL). Before this, I obtained my Bachelor's degree in Computer Science from The Chinese University of Hong Kong and interned at SenseTime Research. Email / Google Scholar / Github / Linkedin |

|
|
|
|
[10-2025] Back on Track has been selected as one of the best paper award candidates at ICCV 2025! [09-2025] CoProU-VO received best paper award at GCPR 2025. Congrats to Jingchao and Oussema! [06-2025] Back on Track (dynamic SLAM with point tracking) was accepted to ICCV 2025 (Oral). [02-2025] AnyCam (feed-forward VO trained with unlabeled data) was accepted to CVPR 2025. Show more[02-2024] LEAP-VO (dynamic VO with point tracking) was accepted to CVPR 2024. [02-2024] NeRF-SCR (NeRF-augmented visual localization) was accepted to ICRA 2024. [10-2023] I joined Technical University of Munich as an ELLIS PhD student. |
|
|

|
Weirong Chen, Ganlin Zhang, Felix Wimbauer, Rui Wang, Nikita Araslanov, Andrea Vedaldi, Daniel Cremers International Conference on Computer Vision (ICCV), 2025 (Oral, Best Paper Candidate) arXiv / Paper / Project Page / Code A method for consistent dynamic scene reconstruction via motion decoupling, bundle adjustment, and global refinement. |
|
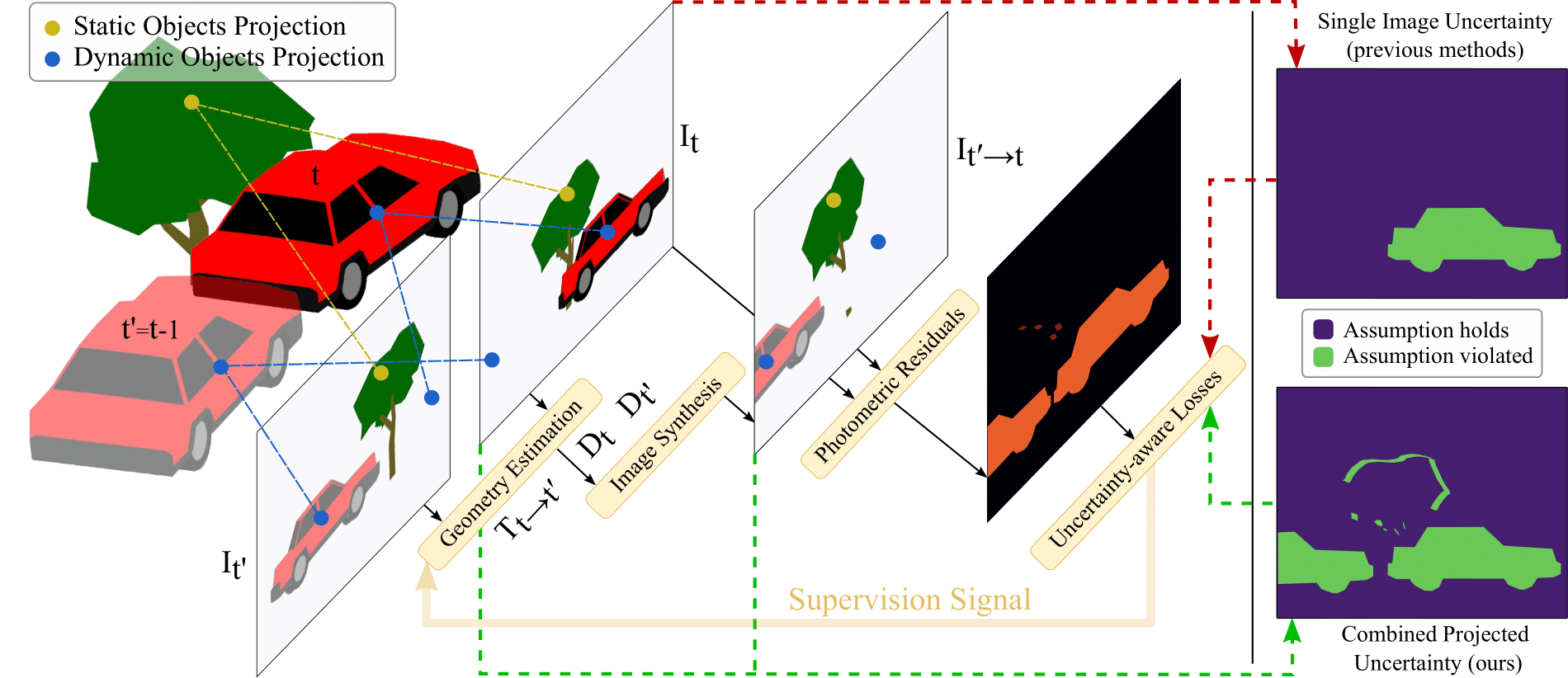
Jingchao Xie*, Oussema Dhaouadi*, Weirong Chen, Johannes Meier, Jacques Kaiser, Daniel Cremers German Conference on Pattern Recognition (GCPR), 2025 (Oral, Best Paper Award) arXiv / Project Page / Code An unsupervised visual odometry method that improves pose estimation in dynamic scenes. |

|
Felix Wimbauer, Weirong Chen, Dominik Muhle, Christian Rupprecht, Daniel Cremers Computer Vision and Pattern Recognition Conference (CVPR), 2025 arXiv / Paper / Project Page / Code A method for learning camera poses and intrinsics from dynamic casual videos. |

|
Weihang Li*, Weirong Chen*, Shenhan Qian, Jiajie Chen, Daniel Cremers, Haoang Li Preprint, 2024 arXiv / Project Page Dynamic radiance field reconstruction from only two images, enabled by object-level bundle adjustment. |
|
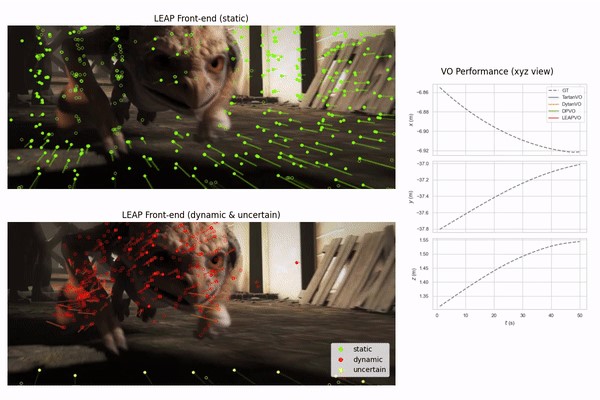
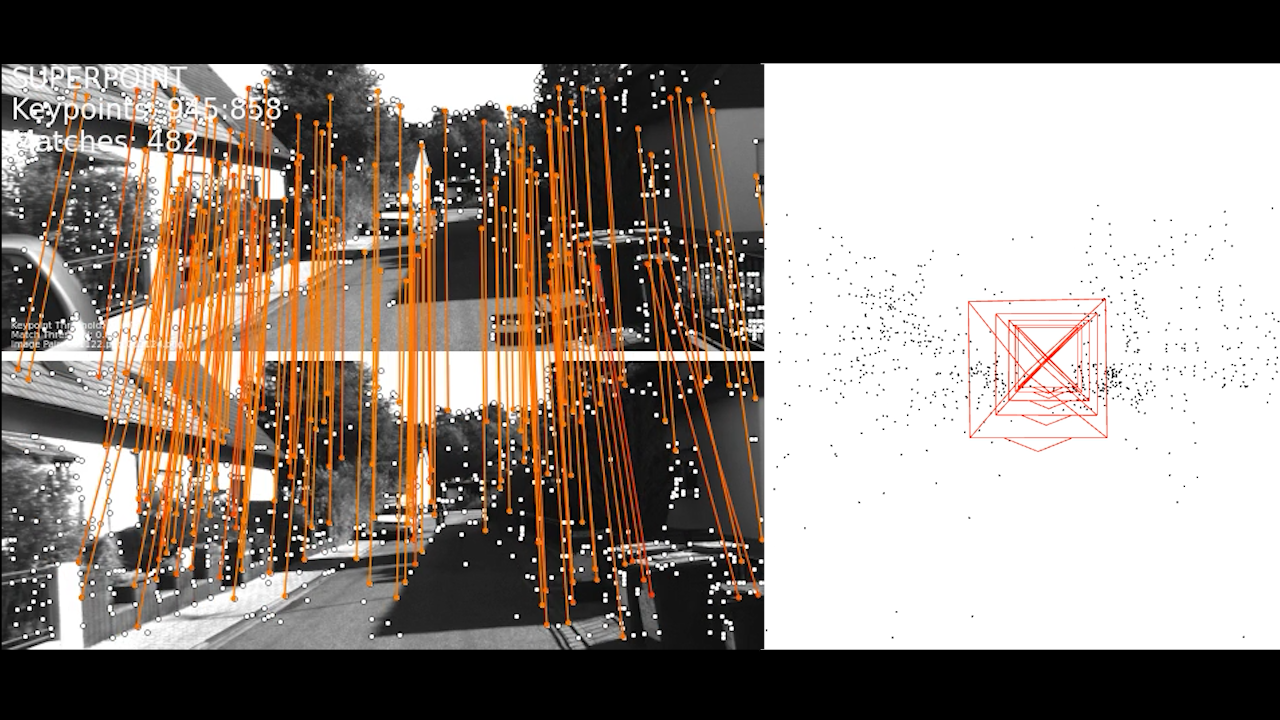
Weirong Chen, Le Chen, Rui Wang, Marc Pollefeys Computer Vision and Pattern Recognition Conference (CVPR), 2024 arXiv / Project Page / Code / Video A robust visual odometry system leveraging temporal context with long-term point tracking to tackle occlusions and dynamic environments. |
|
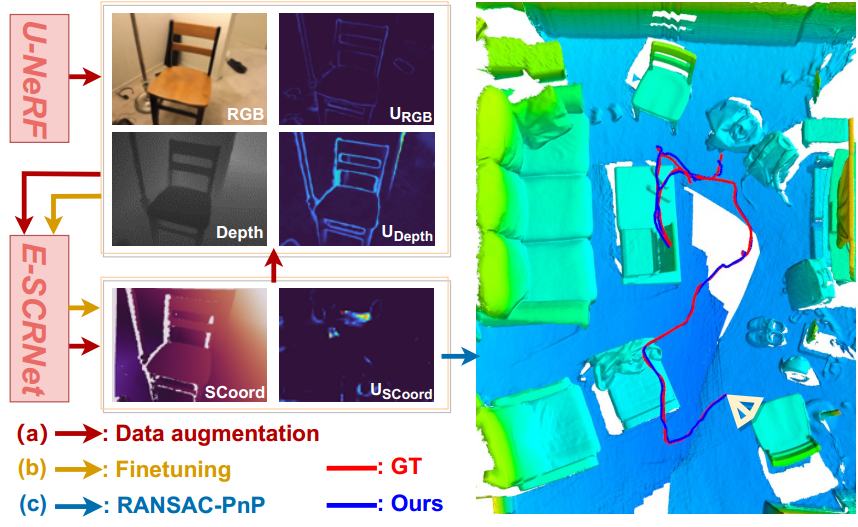
Le Chen, Weirong Chen, Rui Wang, Marc Pollefeys International Conference on Robotics and Automation (ICRA), 2024 arXiv / Video A visual localization pipeline using rendered data from NeRF, uncertainty-guided novel view selection, and evidential scene coordinate regression. |
|
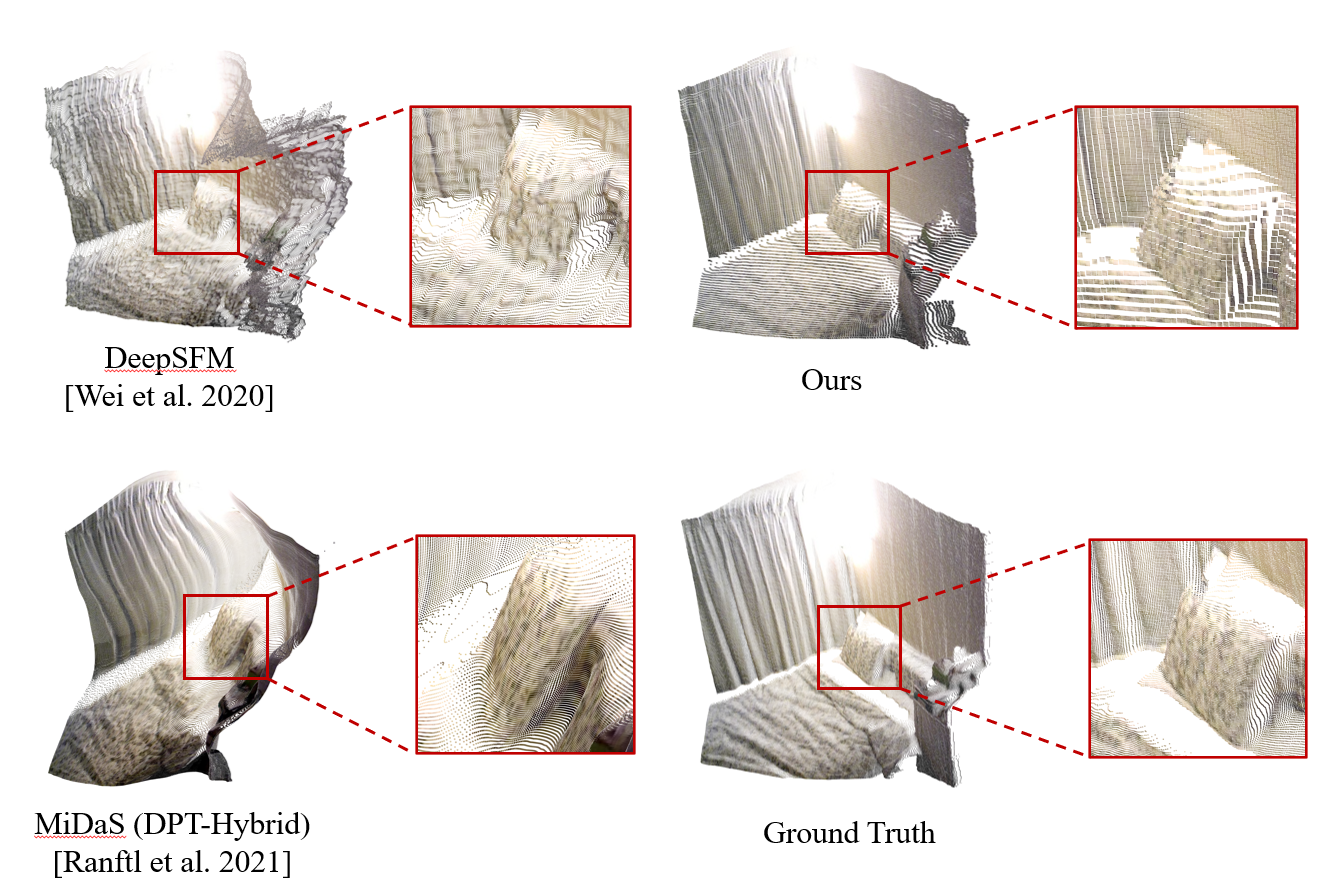
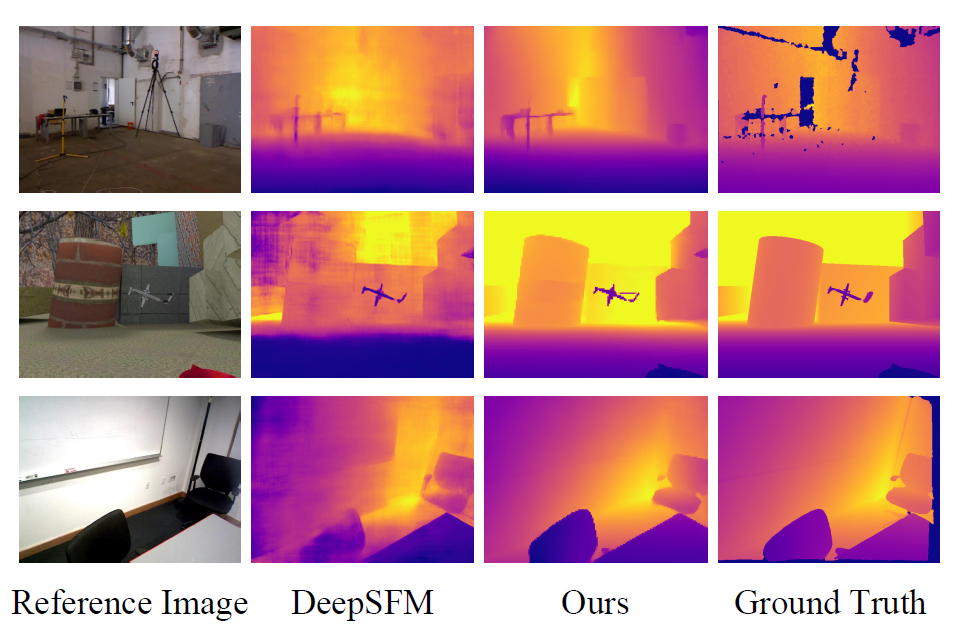
Weirong Chen, Suryansh Kumar, Fisher Yu International Conference on Intelligent Robots and Systems (IROS), 2023 IEEE Robotics and Automation Letters (RA-L), 2023 arXiv / Project Page / Video An accurate and reliable pipeline for dense two-view SfM using weighted bundle adjustment with robust outlier filtering and learning-based confidence modeling. |
|
Jingkang Yang*, Weirong Chen*, Litong Feng, Xiaopeng Yan, Huabin Zheng, Wayne Zhang ACM International Conference on Multimedia (ACM MM), 2020 (Oral) arXiv / Slides Webly supervised learning for semantic label confusion using visual-semantic graph with metadata-aware anchor selection and GNN-based label propagation. |
|
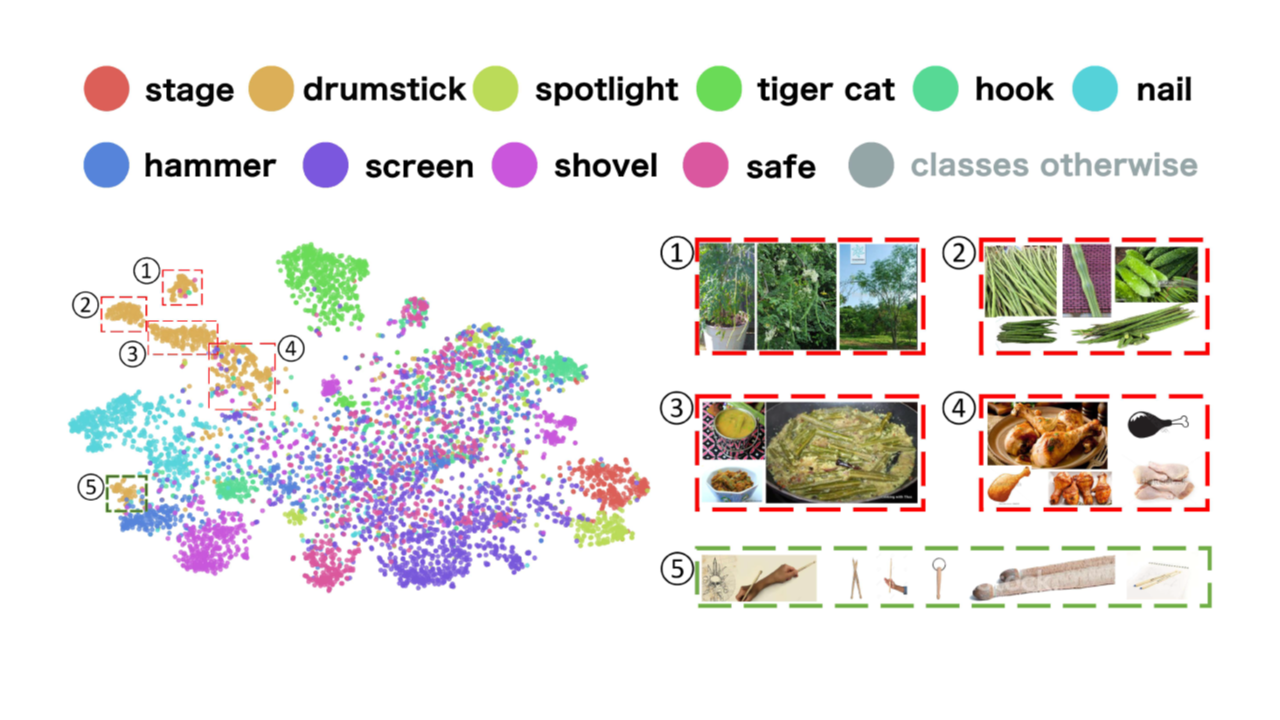
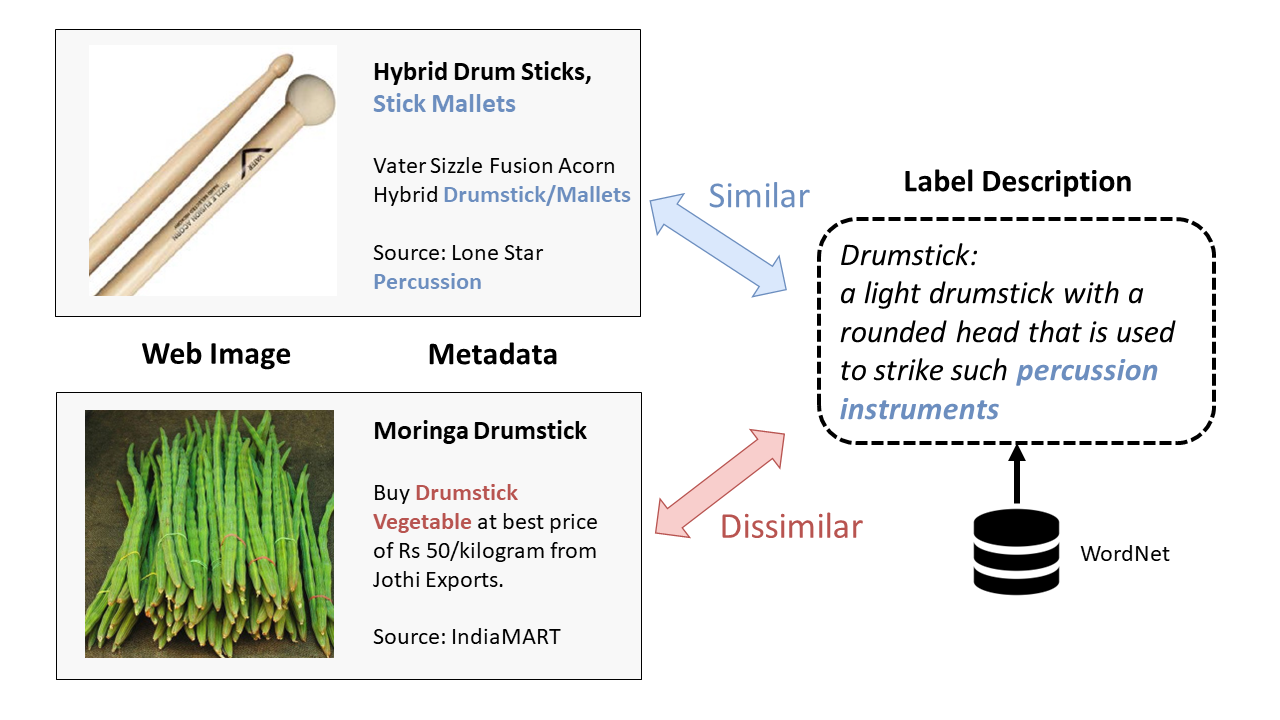
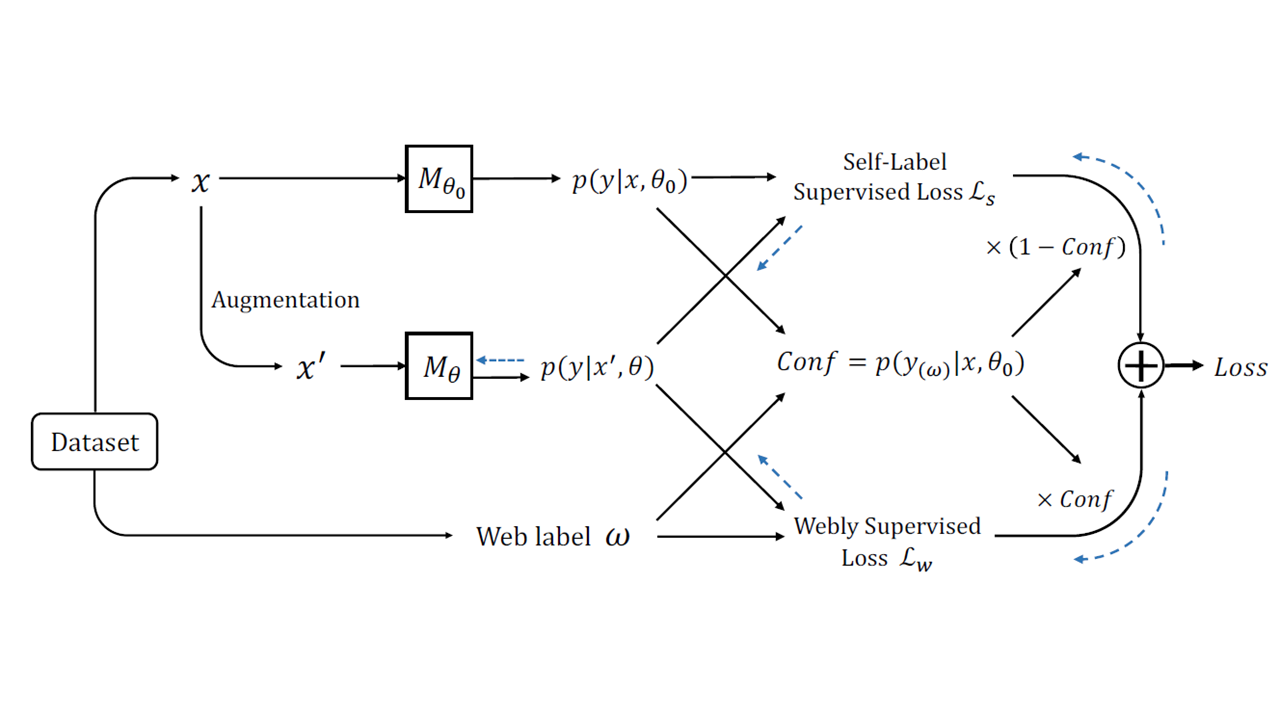
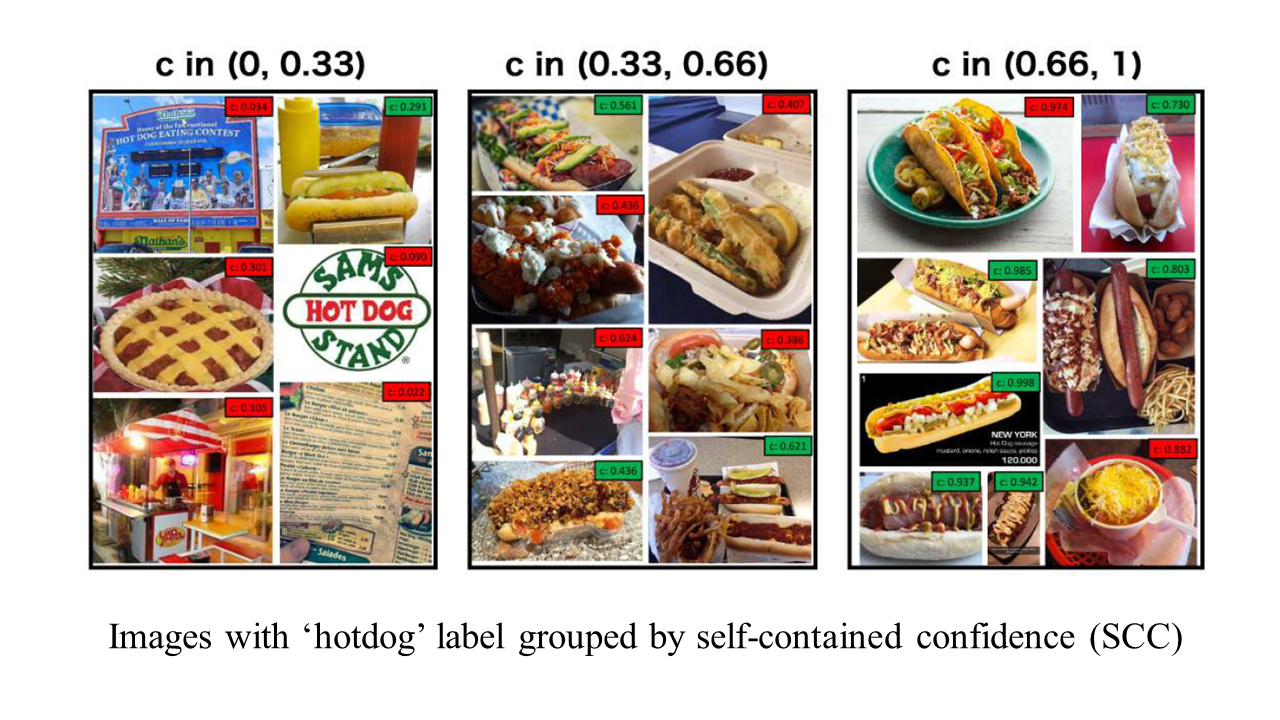
Jingkang Yang, Litong Feng, Weirong Chen, Xiaopeng Yan, Huabin Zheng, Ping Luo, Wayne Zhang European Conference on Computer Vision (ECCV), 2020 arXiv / Code Webly supervised learning for noisy label classification via sample-wise web label correction with model confidence and pseudo machine label. |
|
|
|
Conference with Yifei Liu, Kexin Shi, Yidan Gao Supervised by Paul‑Edouard Sarlin and Marc Pollefeys Demo (KITTI) / Demo (Zurich) / Report A robust and highly-extensible Python SLAM built on pycolmap; achieved better pose accuracy and significant speed improvement compared to COLMAP. |
|
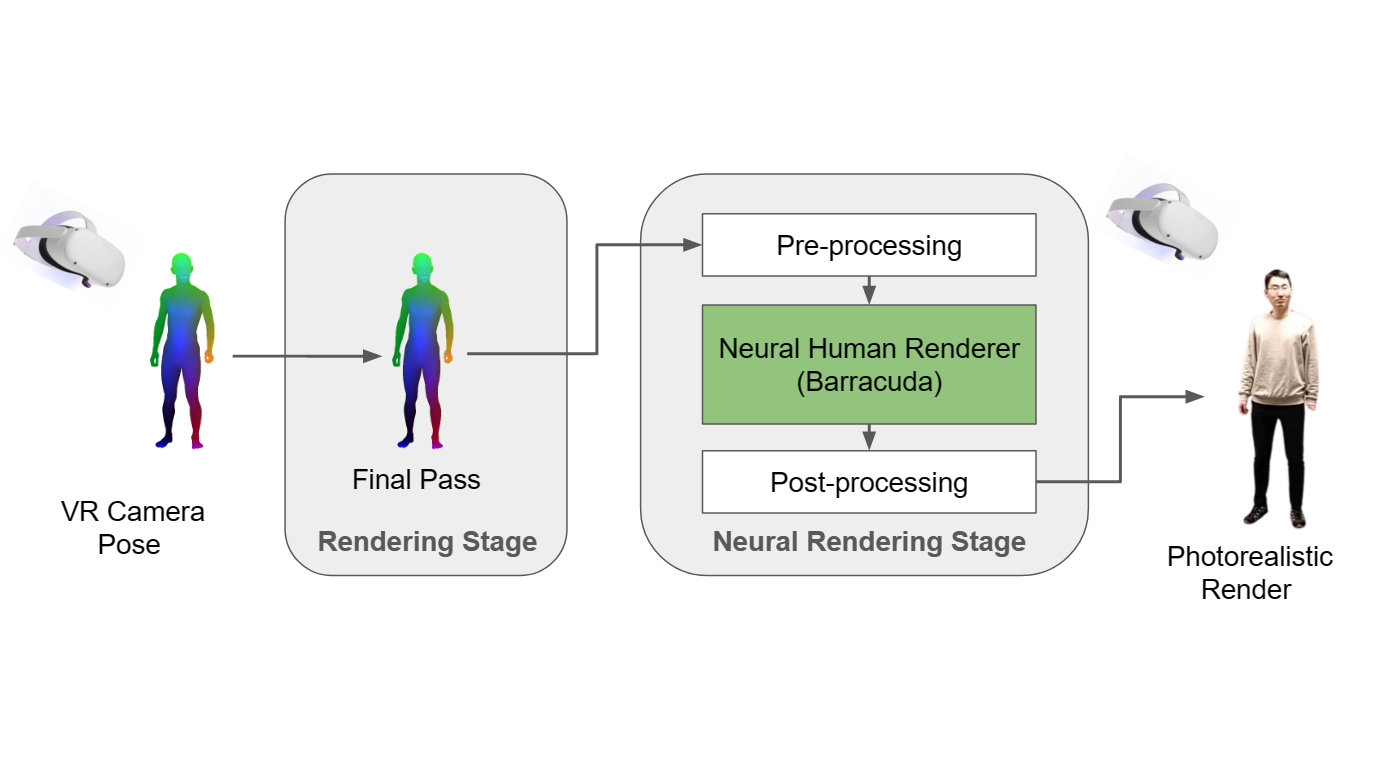
with Shengqu Cai, Mingyang Song, Tianfu Wang Supervised by Sergey Prokudin Demo / Report / Code A general neural rendering pipeline for photorealistic synthesis in VR devices in real-time; demo included human neural rendering and scene style transfer. |
|
|
| Google Research |
Student Researcher Mentors: Keisuke Tateno, Federico Tombari |
07/2025 - 12/2025 |
| Microsoft Spatial AI Lab Zurich |
Master's Thesis Mentors: Rui Wang, Marc Pollefeys |
11/2022 - 08/2023 |
| ETH Computer Vision and Geometry Group |
Semester Project Mentors: Songyou Peng, Marc Pollefeys |
02/2021 - 08/2021 |
| SenseTime Research |
Research Intern Mentors: Litong Feng, Wayne Zhang |
05/2019 - 09/2019 |
|
|
- Conference Reviewer: CVPR, ECCV, ICCV, ICRA, IROS, ICLR
- Journal Reviewer: RA-L
|
Last updated: Oct 2025
|